| Past Projects |
 |
- Learning in Control Engineering |
| Applied to Cart-pole Balancing |
|
| Applied to Attitude control of the Space Shuttle |
| Here we investigate two broad categories of orbiter maneuvers that need to be automated using GARIC (Generalized Approximate Reasoning-based Intelligent Control). Orbiter Attitude Hold Operations A Shuttle attitude controller is expected to perform four basic operations:
Its on-orbit controller or Digital AutoPilot (DAP) is based on modern digital control theory and is a highly optimized controller. It uses two types of thrusters (two levels of jet thrusts), known as primary and vernier, and operates with two different sets of deadband values. All Attitude maneuvers were controlled using vernier jets. In our development we had 3 GARIC controllers for fine tuning membership functions along the three rotational axis, i.e., Pitch, Yaw, and Roll. We were able to maintain deadbands of 0.5, 0.4, 0.3, and 0.2 deg in the tight deadband region without excessive fuel consumption. Translational Control
V Bar Approach
V bar Approach is the approach of the space shuttle along the velocity vector, towards a satellite, such as the Solar Max. This approach is initiated at 400 ft from the satellite and moves into stationkeeping mode as it approaches 50 ft.
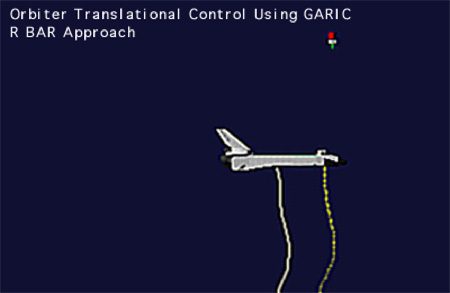
R Bar Approach
R bar Approach is the approach of the space shuttle towards the satellite (SolarMax) along the radius vector. The approach is initiated at 400 ft from the satellite and on reaching 50 ft, the space shuttle starts stationkeeping till the end of observation mission.
Fly Around Approach
Fly Around Approach is the approach from the vbar to rbar, i.e, a quarter circle. The distance to the satellite (Solar Max) is maintained constant. |
| Applied to Tether Control of the Space Shuttle |
| Tether Control on the Space Shuttle
We investigate the possibility of using Generalized Approximate Reasoning Based Intelligent Control (GARIC) for tether control. Tether control consists of three main operations
|
| Applied to Pitch Control in the Space Shuttle Training Aircraft (STA) |
| Pitch-following Control of the STA
The Space Shuttle is both a spaceship and an airplane, hence when training a shuttle crew member, both spaceflight and atmospheric flight must be taught. The Shuttle Training Aircraft (STA) is NASA's flyable training vehicle that duplicates the Shuttle's approach profile and handling qualities in order that an astronaut pilot could see and feel many simulated landing before attempting an actual Shuttle landing. |
| Biologically- Inspired Robotics |
| Developed BioBots in the NASA Institute for Advanced Computer Science (NIACS) Phase I project, resulted in the US patent # US 6,532,400 B1Mar 11, 2003.
IIS BioBots - Robots that walk and run. It is the goal of a group of engineers and scientists at IIS Corp. to develop these IIS BioBots. “Evolutionary designs‿and “Intuitive rules‿are the key words in this Biologically Inspired technology.
|


|
|